

荔枝新闻讯 记者/王晟
今年7月4日和8月20日,我国神舟十二号航天员乘组成功完成两次空间出舱任务。在茫茫宇宙中,托举他们的是我国自行研制的太空神臂——空间站核心舱机械臂。

8月26日,中国航天科技集团官方微信,详细介绍了智能的机械臂是如何让中国的航天员实现“太空自由”,在空间站舱外安全顺利地完成各项任务的。
中国“太空神臂”有“三最”
我国空间站核心舱机械臂,展开长度为10.2米,最多承载重量达25吨。它主要执行舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。
机械臂托举航天员演示图
来源:中国空间技术研究院
据介绍,在整个中国空间站型号任务中,核心舱机械臂是融合了机、电、热、控制、光学等多个专业的“大力士”,而且是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统。
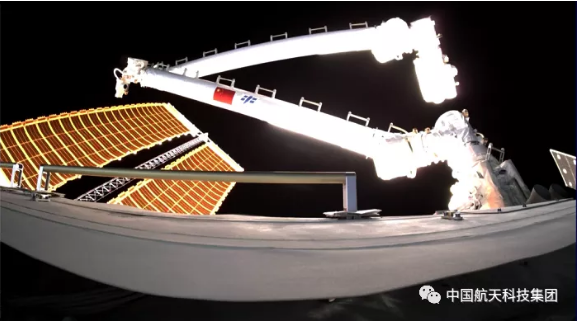
机械臂在太空中展开的实况图
来源:中国航天科技集团
神臂越“自由”,航天员在太空就越自如
业内专家告诉荔枝新闻记者:自由度,是衡量机械臂式机器人性能优劣的一项重要指标。
人类从胳膊到手指有多个关节,让胳膊活动起来灵活自如。
机械臂则是依靠一个个驱动关节来灵活运动。一个关节就被称为一个自由度。
理论上关节越多,机械臂自由度也就越高。但是关节又并非越多越好,需要精密论证,既要考虑到彼此间的协调配合,还要考虑到结构尽可能简单可靠,成本可控。

机械臂在地面完全展开的状态
来源:中国空间技术研究院
据中国航天科技集团介绍,空间站核心舱机械臂,就是一款模仿人类手臂的七自由度机械臂。它总共包含7个关节,分别是肩部3个、肘部1个、腕部3个。


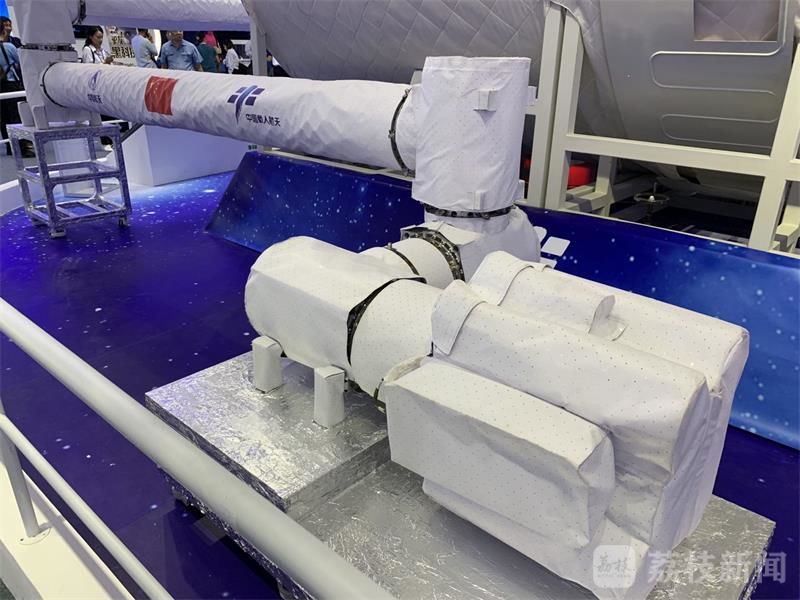
空间站核心舱机械臂的各个关节部位 (样品展示)
荔枝新闻摄于2018年珠海航展
通过各个关节的旋转,机械臂能够实现前后左右任意角度与位置的抓取和操作,真实地模拟人类手臂的灵活运动。
特别值得一提的是:空间站核心舱机械臂——肩部和腕部关节配置相同,意味着机械臂两端活动功能相同,可以实现一个奇妙的功能:
机械臂腕部“抓住”(对接)空间站舱体外某个特定部分(目标适配器),牢牢固定住,原先的肩膀部分则与舱体分离,这就实现了“肩变腕,腕变肩”。
如此一来,一条机械臂就可以绕着中国空间站舱体到处“爬”,在不同的位置上都发挥作用。
机械臂运行动画 来源:央视新闻
“太空神臂” 百分百中国研制
空间站核心舱机械臂,是由中国航天科技集团五院总体设计部抓总研制,从2006年开始就召集精锐专家、骨干力量组成技术攻关工作团队。
研制团队践行自立自强的精神,全面跨越国际技术封锁,在国内首次提出并实现了可爬行、可维护的大型七自由度全对称构型空间机械臂系统方案。先后花费6年时间开展近百余项工程摸底与关键技术验证工作,并在2015年、2017年顺利完成力学试验以及EMC试验(电磁兼容试验)。2021年4月,这条“太空神臂”与中国空间站核心舱,一起被送入太空预定轨道。

空间站机械臂研制团队
来源:中国航天科技集团
研制团队年复一年,夜以继日的努力,不仅让机械臂全部核心部件实现国产化,还形成了多项空间机器人的行业标准,获得多项国家授权专利,出版了多本专著。
中国航天科技集团在介绍中说:机械臂的研制攻关历程,是中国航天科技发展求索创新的一个缩影。
研制团队深刻地认识到:关键核心技术是要不来、买不来、讨不来的,唯有满怀“亦余心之所善兮,虽九死其犹未悔”的奋斗豪情,唯有坚持“甘于坐冷板凳,勇于做栽树人、挖井人”的战斗定力,才能花费十余年的时间,推动空间站机械臂各项指标达到世界领先水平,在空间智能装备的中国制造之路上披荆斩棘、破浪前行。
(本文部分内容来源:中国航天科技集团官方微信、中国空间技术研究院(航天五院)官网、央视新闻|本文系荔枝新闻专稿,拒绝删改)






 公安备案号:32010202010067
公安备案号:32010202010067